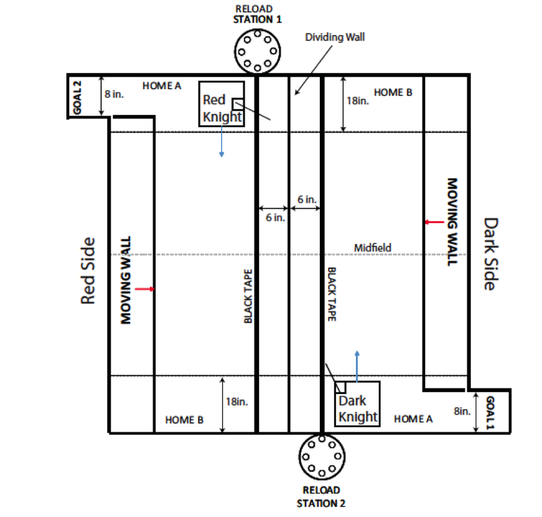
The playing field.
|
The gameThe game was patterned loosely on an absurd mashup of Jousting and Nerf Battle. The object of the game is to design an autonomous robot that "unhorses" the opponent (another autonomous robot) by knocking them off their steed with a "lance". Points are also scored by hitting one's opponent with foam balls or shooting the same foam balls into their goal. Information about the state of the round was available to combating robots via wireless serial peripheral interface (SPI) communication.
|
design and strategy
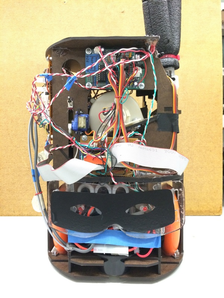
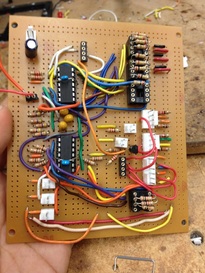
Little Zorro runs off a Freescale E128 micro controller and self-designed event-driven software in C.
- Two DC motors and two caster wheels allow Little Zorro to zip across the playing field.
- Two directly driven encoders and input captures (tape sensors) were used to accurately track position Little Zorro's position on the playing field.
- We used IR sensors to detect the opponent. If an opponent was detected, a foam noodle (our lance) powered by two servo motors deployed, swinging back and forth.
see him in action.Watch Little Zorro go.
|
|
